I robot vengono impiegati, attualmente, in diversi settori clinici, come la neurochirurgia, la chirurgia ortopedica, dentale, oculistica, otorinolaringoiatrica, la laparoscopia addominale e la radiochirurgia. L’impiego dei robot ha anche favorito il progresso nel settore delle attrezzature medicali di supporto, vista le necessità di movimentazione ottimale del paziente nell’impiego di tali sistemi.
La robotica medicale può essere raggruppata in quattro categorie principali:
robotica di posizionamento. Nella robotica di posizionamento, lo strumento chirurgico viene generalmente manovrato da un robot antropomorfo. La movimentazione del paziente deve essere quindi tale da ottenere un livello di precisione corrispondente a quello fornito dalle analisi di imaging preliminari.
robotica di replica del movimento. In tale categoria, sono compresi quei dispositivi che permettono la replica del movimento manuale del chirurgo. A tale scopo, vengono impiegate interfacce robotiche passive. I vantaggi ottenuti comprendono la diminuzione (in scala) dei movimenti, la riduzione del tremore ed il miglioramento dei metodi a bassa invasività.
robotica di imaging. Tale categoria comprende tutti quei dispositivi di imaging montati su sistemi robotici, al fine di acquisire immagini in 2D o 3D.
robotica protesica e riabilitativa. Appartengono a questa categoria tutti quei dispositivi meccatronici impiegati nella terapia di riabilitazione motoria. Ad essa appartengono pure gli esoscheletri robotici, controllati da interfacce cervello-computer, usati per sostituire o supportare strutture anatomiche danneggiate.
Robotica di posizionamento
Nella robotica di posizionamento, la movimentazione del paziente sottoposto ad intervento chirurgico deve essere tale rispecchiare le scelte preliminari relative, ad esempio, al piano di intervento scelto. Per tale scopo, le attrezzature medicali di supporto fondamentali, come i tavoli operatori, devono essere tali da consentire una movimentazione ottimale, precisa e modulare nella massima sicurezza. I relativi cinematismi vengono così azionati da servomeccanismi, che necessitano di sistemi di protezione nelle fasi critiche di avvio ed arresto. Tali sistemi di protezione sono costituiti dai limitatori di coppia, che hanno il compito di disinnestarsi, interrompendo la trasmissione della coppia esercitata dal servomeccanismo. Ciò avviene quando l’inerzia della catena cinematica richiede (accidentalmente) una coppia maggiore di quella impostata, per cui il disinnesto attuato dal limitatore protegge il servomeccanismo. Generalmente, questi limitatori di coppia sono dotati di sensori di fine corsa, che hanno lo scopo di interrompere l’alimentazione del servomotore una volta attuato il disinnesto, oltre che svolgere altre funzioni di supporto al reinnesto.
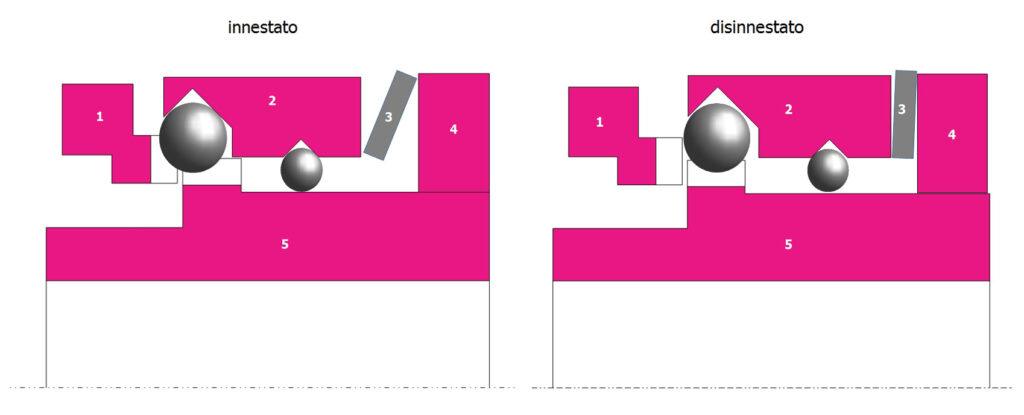
Una tipologia di limitatore di coppia ricorrente è quella ad arresto di sfere, di seguito rappresentata in forma semplificata:
Schema semplificato di un limitatore di coppia con arresto a sfere.
Il componente 1 rappresenta la parte condotta del giunto, mentre la parte 5 la parte motrice. Quando la coppia sulla parte condotta supera la coppia impostata (variando il precarico della molla a tazza 3, tramite la regolazione del componente 4), il meccanismo si disinnesca grazie al componente 2 che sposta le sfere fuori dagli alloggiamenti presenti nel componente 1, vincendo appunto il precarico della molla. La coppia cala improvvisamente, fornendo la protezione del servomotore, il cui albero è calettato sul componente 5. Si tenga presente che tale tipo di giunto, quando innestato, trasmette la coppia senza gioco.
L’estrema precisione dei movimenti, conseguita anche con l’utilizzo dei giunti a soffietto, è richiesta in tutte quelle situazioni in cui il posizionamento reciproco paziente/robot medicale deve essere tale da non intaccare, ad esempio, la superficie dell’articolazione coxo-femorale (che lega l’osso femorale all’anca) durante la rimozione di un tumore localizzato nella rispettiva epifisi (estremità dell’osso). Altra situazione tipica è la cura dell’epifisiolisi (sindrome consistente nella frattura tra epifisi e diafisi, cioè tra estremità e corpo del femore) tramite inserimento di viti, previa esecuzione di fori i cui fondi non devono intaccare la corteccia ossea.
Risulta quindi evidente l’utilità dei giunti a soffietto, in quanto consentono di ottenere accoppiamenti con bassa inerzia, assenza di giochi ed alta rigidità torsionale, per un corretto posizionamento nello spazio dato dalla interpolazione degli assi interessati dal moto.
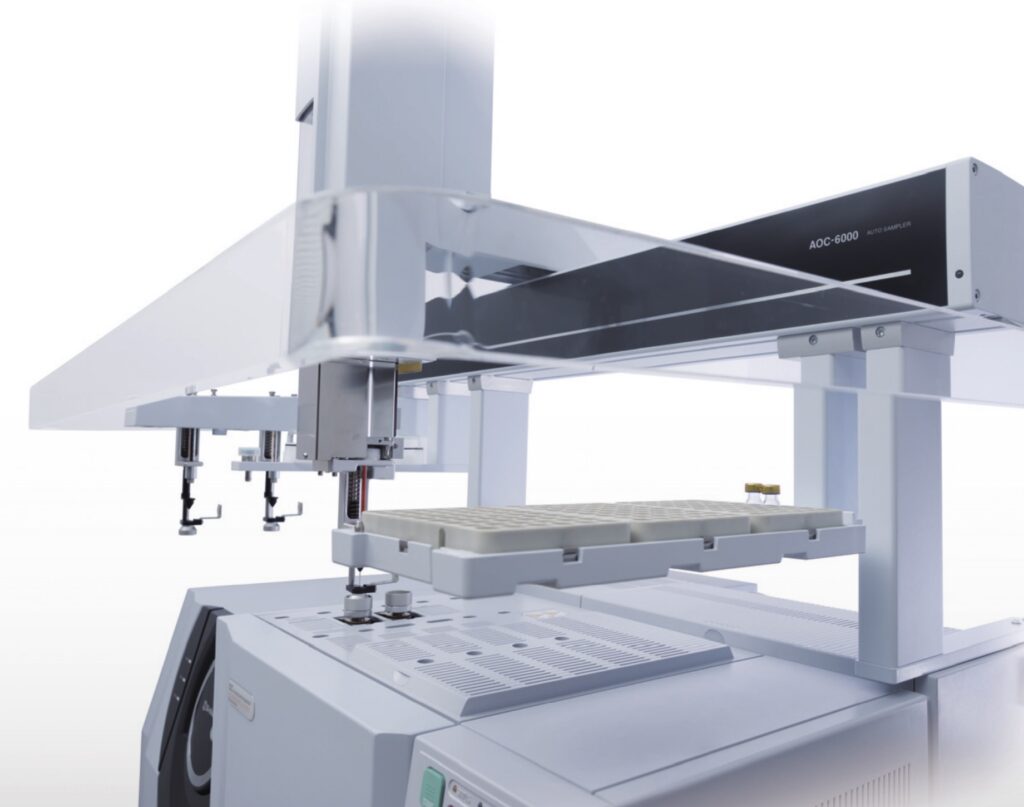
Questi ultimi requisiti sono alla base delle realizzazioni di sistemi robotici medicali anche nel settore della ricerca clinica. In particolare, nell’ambito della ricerca clinica finalizzata, ad esempio, alla determinazione delle quantità di un medicinale presente in una matrice biologica, tali soluzioni sono presenti negli autocampionatori. Tali sistemi robotici sonodi tipo cartesiano e vengono usati per la gascromatografia-spettrometria di massa. Di seguito viene mostrato un esempio commerciale:
Autocampionatore multifunzione AOC – 6000 della Shimadzu. Si noti il magazzino porta moduli siringa e la notevole movimentazione lineare (fonte: https://www.ssi.shimadzu.com/ )
In tali sistemi robotici, risulta fondamentale l’attuazione del moto priva di vibrazioni. Bisogna poi tenere conto delle esigenze di produttività, intesa come il numero di campionamenti successivi da realizzare nel lasso di tempo previsto dal protocollo dell’esame prescelto. Tali esigenze richiedono quindi spostamenti anche rapidi della movimentazione lineare, per cui l’utilizzo di giunti ad elastomero ad effetto smorzante risulta essere ottimale.
Robotica di replica del movimento.
Le configurazioni robotiche viste in precedenza, possono essere impiegate anche in situazioni in cui è richiesta la replica del movimento delle mani di un chirurgo, durante l’esecuzione di un intervento. A tale scopo, si impiegano sistemi di sensori che rilevano i movimenti in maniera tale da poterli replicare con un braccio robotico. La configurazione dello stesso può quindi dare la possibilità di realizzare anche sistemi capaci di realizzare diverse tipologie di intervento, senza cambiamenti sostanziali nella loro architettura.
Il principale vantaggio, nell’utilizzo della robotica di replica del movimento, è quello di ridimensionare l’estensione dei movimenti della mano del chirurgo, con lo scopo di poter realizzare interventi estremamente delicati con una precisione molto alta.
Di seguito viene mostrato il sistema da Vinci S System:
In questa particolare tipologia robotica, stanno assumendo un ruolo sempre più rilevante le attrezzature medicali, in particolare i tavoli operatori descritti in precedenza. Le recenti innovazioni in tali sistemi ha portato alla realizzazione di veri e propri tavoli operatori robotici.
Di seguito viene mostrato un tavolo operatorio che si integra con il da Vinci S System:
Il sistema da Vinci S System, integrato con le attrezzature medicali mostrate, consente di realizzare interventi sia di chirurgia generale che di chirurgia cardiaca, toracica, colorettale ed urologica.
Un’ulteriore applicazione dei robot medicali è l’acquisizione di immagini diagnostiche (imaging). In questa tipologia assume un’importanza fondamentale l’ingegnerizzazione di quei sistemi che svolgono la loro funzione tramite il movimento di componenti spesso molto vicini al paziente. Le catene cinematiche devono essere concepite in modo da non arrecare il minimo danno a quella tipologia di paziente poco collaborativa durante l’esecuzione dell’esame strumentale. In tale ambito, l’impiego dei limitatori di coppia risulta essere, in pratica, reciproco a quello industriale. Ovvero, se in una macchina utensile il limitatore di coppia ha il compito di protezione della catena cinematica da coppie esterne superiori a quelle di progetto, in ambito medicale il limitatore di coppia svolge il compito di proteggere il paziente da interazioni accidentali del paziente con i meccanismi di movimentazione dei dispositivi di imaging. A tale scopo, il limitatore di coppia visto all’inizio trova largo impiego nei sistemi di imaging per ortopantomografia (radiografia panoramica delle arcate dentarieo ortopanoramiche). Nei sistemi per ortopanoramiche più recenti, la scelta ottimale dei limitatori di coppia consente (oltre ai suddetti livelli di protezione), un’attuazione del moto sempre più rapida al fine di ridurre l’intensità dei raggi X. Tutti questi accorgimenti hanno trasformato i sistemi per ortopanoramiche in soluzioni complete per la ricostruzione 3D delle arcate dentarie.
Di fianco viene mostrato un sistema di ultima generazione.
Robotica protesica e riabilitativa.
Dopo la riabilitazione iniziale, gran parte dei pazienti colpiti da ictus ritorna alla loro vita quotidiana, spesso senza recuperare la loro mobilità originaria. Per tali scopi, sono stati sviluppate diverse tipologie di robot per la riabilitazione, anche di piccole dimensioni e semplici nei meccanismi. Scopo di questi robot è quello di attuare movimenti semplici e ripetitivi per il recupero della mobilità.
Altri robot per la riabilitazione presentano la configurazione ad esoscheletro; essi sono largamente impiegati per migliorare la mobilità dei pazienti affetti da paralisi agli arti. La robotica protesica, invece, consente la sostituzione degli arti superiori per i pazienti che hanno perso una o entrambe le braccia a causa di incidenti.
In entrambe le soluzioni, la scelta dei corretti giunti deve fare fronte alle esigenze di una movimentazione altamente precisa, come quella delle protesi di tipo neurale.
In questo settore, la ricerca apre scenari sempre più interessanti ed entusiasmanti. Un esempio eclatante è il progetto Muscle Atrophy Research and Exercise System (MARES) dell’ESA. Tale esperimento ha lo scopo di analizzare gli effetti sulla muscolatura umana dovuti all’assenza di peso. Il sistema è anche integrato nel modulo Columbus della stazione spaziale ISS e fa parte della NASA Human Research Facility. Le principali funzionalità del sistema MARES sono le seguenti:
condurre la ricerca sulla fisiologia muscolo scheletrica, biomeccanica, neuromuscolare e neurologica;
studiare gli effetti della microgravità sul corpo umano;
valutare gli effetti delle contromisure messe in atto per fare fronte a tale effetto e l’efficacia dei protocolli degli esercizi fisici.
Il sistema rende possibile indagare valutare l’atrofia indotta nei gruppi muscolari, sia per le articolazioni individuali del tronco e degli arti che dei soli arti. A tale scopo vengono applicati degli stimoli con velocità o coppia/forza programmabile per ben undici diversi gruppi muscolari del corpo umano, in modo da misurare successivamente la risposta dell’astronauta in termini di forza/coppia e velocità. Risulta quindi cruciale l’impiego di appropriati limitatori di coppia.
Di seguito, viene mostrato il sistema MARES:
Un’attività complessa come la progettazione nell’ambito della robotica medicale, può trovare un valido supporto nei fornitori di componenti. È il caso di R+W, azienda leader nella produzione di giunti e alberi di trasmissione, in grado di mettere la sua esperienza a disposizione del progettista.
Nel settore della robotica medicale, R+W fornisce una gamma completa di soluzioni per tutte le esigenze di trasmissione e limitazione della coppia, quali: giunti a soffietto metallico della serie MK e BK, giunti ad elastomero della serie EK e limitatori di coppia serie SK.
Desideri rimanere informato sul complesso mondo dell’industria meccanica e non solo? Interviste, indagini di mercato e tanto altro, direttamente sul device che preferisci: iscriviti subito alla newsletter R+W, l’esperto dei giunti e delle loro molteplici applicazioni.