








Robotica medicale e tecnologie additive: le soluzioni per gli azionamenti

- Robotica medicale e Tecnologie addditive
- Il setup sperimentale: fasi applicative
- Il ruolo del fornitore di componenti
Introduzione
Il settore medicale è in continua evoluzione, principalmente grazie alla combinazione dei progressi nel campo della Robotica e dell’Intelligenza Artificiale.
Scopo di questa sinergia è la creazione di sistemi di autoapprendimento, pronti per essere implementati anche nell’ambito della robotica collaborativa in ambito medicale.
Questi sistemi hanno lo scopo di automatizzare le operazioni chirurgiche più ripetitive rendendole più precise e meno invasive.
Le attività di ricerca e sviluppo per i sistemi di autoapprendimento costituiscono un motivo di slancio per l’evoluzione delle altre tipologie di sistemi robotici medicali.
Un ruolo importante in tale evoluzione è dato anche dalle tecnologie additive, che contribuiscono a migliorare le caratteristiche meccaniche e funzionali dei sistemi robotici, estendendo le funzionalità di supporto ed estensione delle abilità del chirurgo.
L’obiettivo principale sarà quindi quello della realizzazione rapida di sistemi personalizzati, sulla base delle particolarità sia dell’intervento chirurgico da eseguire che delle condizioni del paziente.
Robotica medicale e Tecnologie additive
È notizia recente la collaborazione tra Intel e l’Università della California, Berkeley, che ha prodotto la realizzazione di un sistema di AI semi-supervisionato per la sutura chirurgica automatizzata.
Questo sistema è stato chiamato Motion2Vec e consiste in un algoritmo di apprendimento, che consente di acquisire i dettagli dei movimenti reali dei chirurghi tramite l’osservazione di un video, per poi riprodurli con alti livelli di precisione.
L’apprendimento visivo costituisce una svolta notevole per la robotica collaborativa in ambito medicale, specialmente per la grande quantità di materiale formativo a disposizione.
Sebbene tale ambito di ricerca sia ancora in fase iniziale, gli ambienti della ricerca condividono la posizione secondo cui i sistemi di robotica medicale collaborativa che implementano algoritmi di Intelligenza Artificiale possono accrescere le prestazioni del chirurgo, sostituendolo in operazioni monotone e ripetitive, come le suture e lo sbrigliamento (debridement).
In questo contesto, il ruolo delle tecnologie additive sta acquisendo un’importanza sempre più crescente, specie nelle fasi di preparazione degli interventi chirurgici.
La tendenza più recente (e sempre più diffusa) è quella di affidarsi a modelli stampati in 3D, che riproducono organi ed altri particolari anatomici, da impiegare nelle attività di addestramento dei chirurghi e di configurazione dei sistemi di robotica medicale impiegati.
Quest’ultima attività prefigura scenari interessanti anche in termini di evoluzione delle attività di progettazione e realizzazione delle movimentazioni nei sistemi robotici medicali; in esse giocano un ruolo fondamentale gli accoppiamenti scelti, che devono rispondere a specifiche esigenze di precisione dei movimenti e limitazione della coppia.
Un importante esempio di questa metodologia di preparazione degli interventi chirurgici è stata condotta nel 2016 durante l’intervento di separazione di due gemelli siamesi, condotta dal Dr. James T. Goodrich, chirurgo di fama mondiale (purtroppo scomparso di recente), pioniere dell’impiego dei modelli anatomici stampati in 3D per la preparazione di interventi di elevata complessità.
Quest’intervento, durato ben 27 ore e che ha coinvolto un’equipe di 40 tra medici e ingegneri esperti in tecnologie additive, ha richiesto l’elaborazione di una tecnica innovativa di preparazione delle operazioni chirurgiche, basata sull’impiego combinato di immagini tridimensionali (ricavate dai dati delle analisi strumentali come la Tomografia Computerizzata, TC o la Risonanza Magnetica Nucleare, RMN) e di stampa 3D, con la quale sono state realizzate sia le necessarie protesi, che un modello 3D anatomico in resine trasparenti delle parti anatomiche sottoposte all’intervento in questione.
Il modello anatomico stampato in 3D è stato utilizzato dall’equipe dei chirurghi per ottimizzare i movimenti di posizionamento dei punti di contatto, i parametri operativi del robot medicale e l’impiego degli altri strumenti chirurgici, con lo scopo finale di rendere l’intervento più preciso e meno invasivo.

Figura 1. Modello per la simulazione di interventi di laparoscopia [fonte: www.3dlifeprints.com]
Sulla base di queste esperienze, risulta di fondamentale importanza l’impiego dei modelli di parti anatomiche stampati in 3D, sia per le simulazioni nell’ambito della chirurgia robotica (in termini di addestramento, ottimizzazione e preparazione degli interventi), che come riferimento per le attività di progettazione e realizzazione delle catene cinematiche dei sistemi di movimentazione di robot medicali con caratteristiche di autonomia più o meno marcate.
In Figura 1 è mostrato un modello per le simulazioni chirurgiche realizzato con tecnologie additive, impiegato nelle attività di addestramento dei chirurghi alle tecniche di laparoscopia.
In Figura 2 è mostrato un esempio di impiego di un analogo modello per le operazioni di verifica dei parametri operativi di un robot medicale, anch’esso impiegato in laparoscopia.

Figura 2. Impiego di un modello 3D per la verifica dei parametri operativo di un sistema robotico per interventi in laparoscopia [fonte: www.3dlifeprints.com]
La tipologia di robot medicale come quello mostrato in Figura 2, inizialmente concepita come robot di replica del movimento, sta attualmente subendo una conversione al funzionamento in modalità prevalentemente collaborativa, grazie all’introduzione dei metodi di simulazione esposti.
L’integrazione sempre più diffusa degli algoritmi di AI nei sistemi di robotica medicale sta creando opportunità significative per le tecnologie additive, al di là delle soluzioni per la preparazione degli interventi chirurgici, come quelle mostrate in precedenza.
La crescente richiesta di sistemi robotici collaborativi (usati anche in ortopedia, oltre che negli interventi in laparoscopia) sta accrescendo la necessità di disporre di una produzione di componentistica rapida ed efficiente.
Tale necessità viene soddisfatta dal principale vantaggio derivante dall’impiego delle tecnologie additive: la semplificazione e la riduzione di tempi e costi delle fasi di ricerca e sviluppo, in termini di realizzazione di prototipi, di svolgimento di test e di produzione di miniserie di componenti robotici e strumentazioni chirurgiche.
L’impiego delle tecnologie additive consente, inoltre, il conseguimento di elevati livelli di personalizzazione della componentistica, con promettenti risvolti nelle attività di progettazione e realizzazione degli opportuni accoppiamenti cinematici.
Nella chirurgia mininvasiva, ad esempio, il team medico fa ricorso a piccoli strumenti chirurgici collegati ad un braccio robotico, che viene controllato tramite un computer.
Una delle principali criticità di questa tipologia di strumenti chirurgici è quella di essere di dimensioni uniche, al contrario delle naturali differenze che presenta l’anatomia delle parti soggette ad intervento di ciascun paziente rispetto ad un altro.
Un’interessante e promettente soluzione a questa criticità è stata proposta, di recente, dall’Australian Centre for Robotic Vision, un centro di ricerca per la visione robotica fondato nel 2014 dal Consiglio delle Ricerche Australiano (Australian Researc Council, ARC).
In tale soluzione, il punto di partenza è dato dai risultati di imaging diagnostico tramite Risonanza Magnetica, con cui mappare le caratteristiche dell’articolazione del ginocchio di un paziente, da sottoporre ad intervento con tecniche di artroscopia.
Partendo da questi dati, la soluzione proposta procede alla progettazione della soluzione di robotica modulare personalizzata più adeguata alle particolari conformazioni anatomiche del ginocchio del paziente.
Le attività dei chirurghi saranno così condotte ricorrendo all’utilizzo di un sistema robotico modulare, i cui componenti verranno realizzati ad hoc con le opportune tecnologie di stampa 3D.
Un primo setup sperimentale di questo sistema è stato elaborato dal giovane ricercatore Andrew Razjigaev dell’Australian Centre for Robotic Vision, che ha concepito il primo robot di tipo snakebot per l’artroscopia del ginocchio.

Figura 3. Una versione di snakebot [fonte: biorobotics.ri.cmu.edu]
Con il termine snakebot si individua una tipologia di robot biomorfo, simile ad un serpente, che ha la caratteristica di essere iper-ridondante, ovvero di richiedere ben più di sei gradi di libertà per la realizzazione (e la descrizione del moto) della sua catena cinematica.
Uno dei primi esempi di snakebot destinato ad impieghi medicali è stato concepito dal CMU Robotics Lab della Carnegie Mellon University.
In Figura 3 è mostrato una versione di questo robot.
Il modello del CMU Robotics Lab per uso medicale è stato derivato da quello mostrato in Figura e realizzato in dimensioni talmente sottili da poter manovrare intorno agli organi all’interno di una cavità toracica umana.
Gli snakebot, a prescindere dalle dimensioni delle singole realizzazioni, sono caratterizzati da un basso rapporto tra la superficie della sezione trasversale e la lunghezza, per cui riescono a manovrare all’interno di spazi molto stretti.
Il setup sperimentale: fasi applicative
Il setup sperimentale, realizzato dal ricercatore Andrew Razjigaev, viene mostrato nelle immagini seguenti.
È estremamente interessante esaminare i singoli step di applicazione di questa soluzione:
- si parte dai dati delle analisi di imaging del ginocchio del paziente. Con la supervisione di un medico chirurgo, il computer classifica le regioni che devono essere raggiunte dagli snakebot (superfici verdi) e le regioni da evitare (superfici rosse), come mostrato in Figura 4;
- la geometria risultante fornisce un ambiente 3D dove gli snakebot competono in un’evoluzione simulata. Ciò dà la possibilità, ad un numero di proposte di progettazione standard degli snakebot partecipanti, di essere testate e valutate sulla bontà delle loro prestazioni, cioè su quanto riescano a raggiungere, con efficacia, determinate posizioni all’interno del ginocchio di un paziente. Le linee nere mostrate in Figura 4 rappresentano alcune delle traiettorie seguite dagli snakebot in competizione per raggiungere le posizioni prefissate sull’articolazione del paziente;
- a questo punto entra in gioco un algoritmo di computational design evolutivo, generando in continuazione nuove configurazioni di snakebot, ritestandole ed eliminando le varianti più “deboli” finché ne sopravvive solo una, che si abbina in maniera unica all’anatomia del paziente. Lo snakebot che riesce a raggiungere le posizioni prefissate in sicurezza e con più destrezza vince la competizione evolutiva, aggiudicandosi il riconoscimento di design ottimale;
- gli snakebot ottimali vengono così generati come modelli 3D e realizzati tramite tecnologie additive, al fine di diventare degli strumenti chirurgici low-cost, monouso e unici per ciascun paziente;
- gli snakebot sono così pronti per essere impiegati nell’intervento chirurgico. Questi micro robot vengono collegati ad una piattaforma robotica più grande, come la piattaforma robotica collaborativa per la ricerca Raven II (concepita dalle università di Washington e di Santa Cruz), che li posiziona in modo da consentire il loro ingresso nei punti in cui sono state realizzate le incisioni chirurgiche. Il risultato di questo step è mostrato in Figura 5.
- uno dei primi possibili sviluppi di questa soluzione è l’impiego di due snakebot con gli strumenti chirurgici istallati alle estremità, in modo da consentire al chirurgo di eseguire interventi chirurgici a distanza con due bracci robotici;
- nel sistema a robot multipli mostrato in Figura 5, vi può essere un terzo snakebot che monta una telecamera alla sua estremità. Questo sistema di acquisizione delle immagini verrà usato da un sistema di visione robotica (robot vision) per mappare le cavità del corpo del paziente, cosicché il robot può essere guidato verso le aree di interesse e tenuto lontano dalle aree delicate da evitare. Fornirà quindi funzioni di tracciamento sia per i due snakebot che per l’area di lavoro dell’intervento, operando come gli occhi del chirurgo.
-
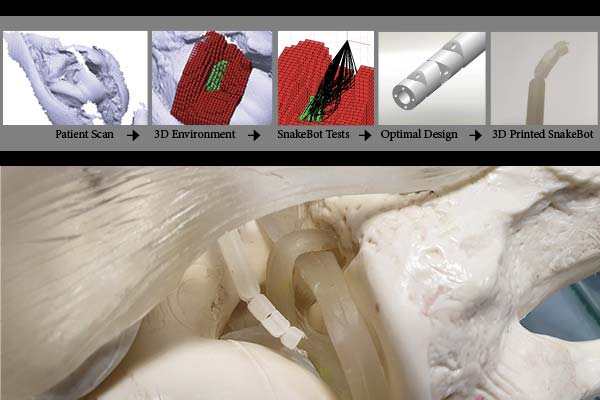
- Figura 4. Classificazione delle aree di intervento da dati di analisi di imaging [fonte: www.roboticvision.org]
-
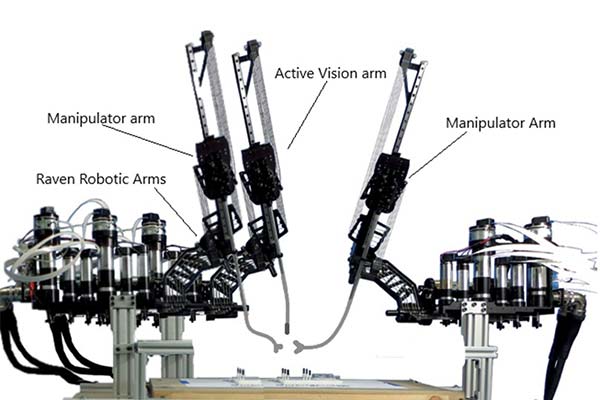
- Figura 5. Setup finale con snakebot multipli personalizzati [fonte: www.roboticvision.org]
Gli ambiti di ricerca fin qui esposti forniscono miglioramenti evidenti non solo in termini di non invasività e precisione degli interventi chirurgici, ma costituiscono anche un interessante ambito di ricerca e sviluppo per tutta la componentistica necessaria alla realizzazione degli accoppiamenti cinematici, viste le elevate capacità di personalizzazione delle soluzioni (anche preesistenti) e di realizzazione rapida ed efficiente dei prototipi, che solo l’impiego delle tecnologie additive può fornire.
Il ruolo del fornitore di componenti
Un’attività complessa come la progettazione nell’ambito della robotica medicale, che integra componentistica evoluta realizzata tramite le tecnologie additive, può trovare un valido supporto nei fornitori di componenti.
È il caso di R+W, azienda leader nella produzione di giunti e alberi di trasmissione, in grado di mettere la sua esperienza a disposizione del progettista. Nel settore della robotica medicale, R+W fornisce una gamma completa di soluzioni per tutte le esigenze di trasmissione e limitazione della coppia, quali: giunti a soffietto in miniatura della serie MK e FK, giunti a soffietto metallico della serie BK, giunti ad elastomero della serie EK e limitatori di coppia serie SK.
