








Evoluzione dei sistemi collaborativi in chirurgia ortopedica

- Cenni storici
- I principi di funzionamento dei sistemi robotici per la chirurgia ortopedica
- Le architetture di sistema più ricorrenti nei sistemi robotici per la chirurgia ortopedica
- Esempi di applicazioni specifiche dei sistemi robotici per la chirurgia ortopedica
- Il ruolo del fornitore di componenti
I sistemi robotici medicali impiegati in branche della chirurgia quali la neurochirurgia, presentano spiccate caratteristiche collaborative, essendo impiegati principalmente per il posizionamento nel trattamento delle lesioni cerebrali e per assistere i chirurghi nelle azioni di presa e fissaggio degli strumenti chirurgici.
La tecnica chirurgica della laparoscopia ricorre, ormai diffusamente, all’impiego di sistemi robotici come la serie Da Vinci della Intuitive Surgical, allo scopo di rendere minimamente invasivi gli interventi sia di chirurgia generale che di chirurgia cardiaca, toracica, colorettale ed urologica, operando con modalità collaborative.
Anche i sistemi robotici per la chirurgia vascolare presentano caratteristiche di collaboratività e di scarsa invasività, ottenute grazie al conseguimento di elevati standard di precisione e protezione, per mezzo della realizzazione di apposite catene cinematiche.
Verranno illustrati di seguito gli aspetti di collaboratività della robotica medicale specifica per la chirurgia ortopedica.
Cenni storici
La robotica costituisce, attualmente, una delle aree di ricerca e sviluppo più influenti sia in ambito scientifico che tecnologico.
Partendo dai primi robot industriali (gli Unimate, inventati da George Devol nel 1950 e brevettati nel 1954 con numero US2988237A), si è arrivati alla realizzazione di robot umanoidi capaci di camminare su due gambe (robot Atlas®, sviluppato dalla Boston Dynamics) ed a sistemi robotici medicali utilizzati sia in ambito chirurgico che riabilitativo.

Figura 1. Dr. Yik San Kwoh
Un primo esempio di sistema robotico utilizzato in chirurgia risale al 1985, anno in cui il Dr. Yik San Kwoh presentò la sua tecnica di inserimento di un ago per biopsia endocranica utilizzando un robot industriale UNIMATE PUMA 200. Tale sistema, mostrato in Figura 1, sebbene precorse molte caratteristiche di quelli attuali, non riscosse molti consensi a causa delle obiezioni mosse all’epoca, in merito al fatto che il robot industriale utilizzato non fosse concepito per interagire direttamente con l’essere umano. Ciò comunque non influì negativamente sulle attività di ricerca e sviluppo dei decenni successivi, determinando una rapida diffusione della robotica medicale in diverse aree.
Nell’ambito della chirurgia ortopedica, il primo sistema sviluppato per l’esecuzione degli interventi di artroplastica totale dell’anca fu il ROBODOC. Tale sistema fu inizialmente sviluppato per la preparazione delle cavità femorali, basandosi su dati ottenuti da scansioni intraoperatorie. Il vantaggio da ottenere con tale sistema fu individuato nella maggiore stabilità della protesi a lungo termine, per effetto della migliore adattabilità all’osso. I primi prototipi furono sviluppati dal 1986 al 1989 presso il Thomas J. Watson Research Center dell’IBM a Yorktown, insieme alla University of California, Davis.
Il cuore del sistema consiste nel metodo di trasformazione dell’immagine acquisita di un osso lungo in un sistema di coordinate spaziali robotiche. Tale metodo comprende l’identificazione, nei dati di imaging acquisiti, delle coordinate direzionali che rappresentano l’asse dell’osso e di almeno una coordinata posizionale sulla superficie dell’osso. Le coordinate corrispondenti sull’osso reale, immobilizzato nel sistema, vengono così determinate tramite una sonda collegata al terminale di un braccio robotico manipolabile, con cui toccare l’osso nei punti corrispondenti a quelli ricavati dai dati di imaging. Questi ultimi dati, insieme a quelli rilevati sull’osso reale, vanno a costituire il percorso del robot. Risulta evidente come lo sviluppo di questo (come di altri sistemi che vedremo di seguito) abbia richiesto un’attenta attività di ricerca in merito al corretto dimensionamento degli accoppiamenti cinematici, fornendo i presupposti per lo sviluppo degli altri sistemi successivi, anche in termini di rispondenza ai requisiti di collaboratività.
I principi di funzionamento dei sistemi robotici per la chirurgia ortopedica
Le attività principali nell’ambito della ricerca e sviluppo dei sistemi robotici per la chirurgia ortopedica, hanno come oggetto lo sviluppo di tecniche di navigazione e robotiche per il trattamento di interventi quali l’artroplastica dell’anca e del ginocchio, la chirurgia spinale e la riparazione di fratture. Le tecnologie di navigazione e robotiche sviluppate sono state concepite per migliorare la qualità complessiva della chirurgia ortopedica, fornendo al chirurgo una percezione estesa, un feedback quantitativo ed una guida precisa durante l’intervento, unitamente alla contestuale raccolta di una dettagliata documentazione elettronica sul particolare caso clinico.
Le tecniche di navigazione tipicamente impiegano sistemi di tracking in 3D per monitorare le posizioni spaziali degli strumenti e delle strutture anatomiche, aumentando la precisione dell’intervento e migliorando potenzialmente sia la longevità dell’impianto che il recupero funzionale per il paziente. La collaboratività offerta da tali sistemi offre un grado superiore di controllo fornendo una guida meccanica precisa agli strumenti del chirurgo durante le fasi principali dell’intervento. Idealmente, tali sistemi dovrebbero anche accelerare gli interventi stessi, ottimizzandone i tempi di esecuzione e dando la possibilità al chirurgo di effettuare un numero maggiore di procedure con maggior precisione.
Al fine di definire le caratteristiche funzionali e collaborative degli attuali sistemi robotici per la chirurgia ortopedica, è opportuno passare brevemente in rassegna le procedure fondamentali nell’impiego di tali sistemi durante l’esecuzione di un intervento.
Una prima procedura è la realizzazione di un modello virtuale della zona interessata. Per tale procedura vengono impiegate due tipologie di sistemi di imaging medicale, che si differenziano sulla base dei momenti di acquisizione delle immagini.
Nel sistema di acquisizione delle immagini preoperatorio, i dati del paziente vengono acquisiti prima dell’intervento tramite Tomografia Computerizzata (TC) o Risonanza Magnetica Nucleare (RMN), al fine di ottenere delle immagini tridimensionali. Un limite a tale sistema è dato dalla possibilità che la morfologia dell’osso possa cambiare dopo l’acquisizione delle immagini.
Impiegando, invece, un sistema di acquisizione delle immagini intraoperatorio, vi è la possibilità di creare un modello virtuale secondo il posizionamento in tempo reale del paziente sul tavolo operatorio, tramite Tomografia Computerizzata, fluoroscopia a 2D e 3D, oppure utilizzando un sistema di imaging del tipo O – arm. Queste metodiche di imaging espongono comunque il paziente ad un rischio di radiazioni, per cui vengono sostituite con altri sistemi privi di radiazioni, che possono registrare i dati anatomici tramite uno strumento portatile sulla superficie dell’oggetto chirurgico.
Quest’ultimo sistema presenta molti vantaggi nei casi in cui le strutture dei tessuti (quali ad esempio quelli dei legamenti) non possano essere individuate tramite TC; i dati anatomici vengono quindi generati in maniera intra operatoria direttamente dai chirurghi, mentre i punti di riferimento che non sono direttamente accessibili possono essere calcolati dal computer. Entrambi i metodi di acquisizione delle immagini presentano, quindi, dei particolari punti di forza dal punto di vista chirurgico (preparazione del paziente, navigazione dei piani di taglio ecc.) ma risultano anche determinanti in termini progettuali, in quanto forniscono dei requisiti ben precisi in relazione alle esigenze di precisione e protezione della catena cinematiche da realizzare, tramite un’appropriata scelta degli accoppiamenti cinematici.
Una seconda procedura è quella della registrazione o corrispondenza, richiesta nei casi in cui le immagine pre operatorie vengano impiegate per la modellazione virtuale. Scopo di tale procedura è quello di far combaciare i dati di posizionamento reali con quelli virtuali. Per l’esecuzione di tale procedura sono stati utilizzati, in passato, metodi più o meno invasivi e precisi; attualmente viene utilizzata una tecnologia ad infrarossi, che può fornire una misurazione accurata e precisa della posizione.
La terza procedura consiste nell’esecuzione vera e propria dell’intervento chirurgico. L’intervento chirurgico in ambito ortopedico, eseguito con l’ausilio di un sistema robotico, inizia dopo aver completato la corrispondenza tra i dati reali rilevati sul tavolo operatorio con il modello virtuale realizzato al computer.
Le architetture di sistema più ricorrenti nei sistemi robotici per la chirurgia ortopedica
A partire dal 2005 sono stati identificati ben 150 diverse tipologie di sistemi robotici per la chirurgia, di cui ben 31 concepiti in maniera specifica per quella ortopedica; di questi ultimi, ben pochi sono diventati delle soluzioni commerciali. Tali sistemi possono essere classificati sulla base delle caratteristiche seguenti:
- architettura della catena cinematica;
- progettazione del sistema di controllo;
- interfaccia anatomica;
- dimensioni e modalità di istallazione nella sala operatoria.
Sulla base dell’architettura della catena cinematica, si distinguono i sistemi seriali (robot a braccio singolo) o paralleli (basati su una piattaforma di Gough-Stewart con sei attuatori prismatici). Sono anche possibili delle realizzazioni ibride, in cui un dispositivo di estremità piccolo e preciso viene montato alla sommità di un braccio robotico per la diagnostica.
La dimensione complessiva di un sistema robotico può influenzare in maniera significativa le modalità con cui viene posizionato nella camera operatoria e viene usato dallo staff. Sistemi robotici di dimensioni maggiori vengono montati su ruote e coperti con panni sterili appena prima dell’intervento. Ad un’opportuna fase dell’intervento chirurgico, il robot viene spostato direttamente accanto il tavolo operatorio, posizionando così lo strumento chirurgico rispetto al paziente. Sistemi robotici di maggiori dimensioni tipicamente offrono spazi di lavoro più grandi con un numero maggiore di gradi di libertà, che possono consentire il controllo di percorsi di movimento in 3D più complessi; in questi particolari sistemi risulta molto impegnativa la progettazione sia delle catene cinematiche che degli spazi di azione destinati allo staff medico.
Un approccio progettuale profondamente diverso riguarda i sistemi robotici in miniatura, concepiti per essere sufficientemente compatti e leggeri, in modo da essere montati direttamente sull’osso del paziente o tenuti in mano dal chirurgo durante l’intervento. I sistemi robotici montati sull’osso si basano su un fissaggio rigido in modo da mantenere alti livelli di precisione.
La realizzazione dell’interfaccia anatomica costituisce quindi la principale criticità progettuale, in quanto non solo va approvata secondo gli standard clinici ma va anche contestualizzata nell’attività globale di progettazione della catena cinematica su cui va installata, in quanto deve fornire un sufficiente livello di rigidezza senza imporre vincoli significativi all’intervento chirurgico o alla dimensione delle incisioni.
Una volta istallati, i sistemi robotici montati sull’osso si muovono in maniera solidale con lo stesso, per cui non vi è l’esigenza di immobilizzare l’arto o di ricorrere a sistemi di compensazione del moto durante la preparazione dell’osso. Quest’ultima caratteristica può essere estremamente utile per i sistemi che implementano tecniche di tracking ottico, dal momento che può non essere necessario mantenere la visuale con la camera, cosicchè il chirurgo ed il suo staff possono posizionarsi liberamente intorno al tavolo operatorio.
I sistemi robotici per la chirurgia ortopedica possono essere progettati con caratteristiche di autonomia più o meno marcate. In tale ottica risultano definite le caratteristiche di collaboratività del sistema scelto, per cui i sistemi robotici per la chirurgia ortopedica vengono attualmente raggruppati in tre categorie principali:
- sistemi passivi;
- sistemi attivi;
- sistemi semi-attivi.
I sistemi passivi prevedono una manipolazione diretta e completa da parte del chirurgo, che opera sulla base delle informazioni fornite dal sistema.
I sistemi attivi possono eseguire alcuni compiti in maniera autonoma.
I sistemi semi-attivi, infine, presentano un certo grado di autonomia ma richiedono ancora l’intervento del chirurgo nella definizione di alcuni parametri operatori, come quelli di resezione. I sistemi semi-attivi, inoltre presentano caratteristiche di collaboratività più marcate, in quanto aiutano il chirurgo autonomamente nel posizionamento degli impianti ossei e delle piastre di guida per il taglio, oltre guidare nel posizionamento degli strumenti in maniera precisa ed efficace. Alcuni sistemi robotici presentano anche funzioni automatiche di taglio e fresatura dell’osso.
Sulla base di questa classificazione, si possono individuare quattro tipologie di sistemi robotici:
- portastrumenti, nei quali il robot posiziona una guida di taglio e la mantiene ferma, mentre il chirurgo inserisce uno strumento di taglio attraverso la guida stessa;
- teleoperatori, nei quali un chirurgo opera su una consolle di controllo ed i suoi movimenti vengono replicati da un dispositivo a distanza che opera sul paziente;
- robot completamente autonomi, nei quali il robot esegue da solo il processo di taglio sotto il controllo del chirurgo, che può intervenire bloccandolo in qualsiasi momento;
- robot a vincoli attivi, nei quali il chirurgo opera con lo strumento di taglio mentre il robot vincola attivamente le azioni all’interno di una zona sicura.
Esempi di applicazioni specifiche dei sistemi robotici per la chirurgia ortopedica
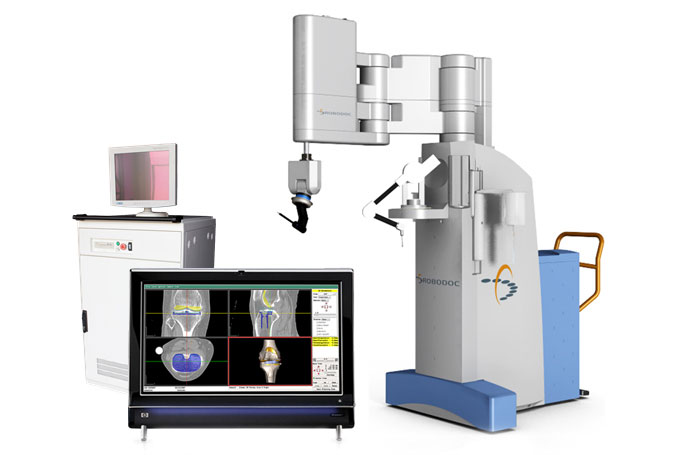
Come accennato all’inizio, il primo sistema robotico attivo per la chirurgia ortopedica fu il ROBODOC, attualmente prodotto dalla compagnia sudcoreana CUREXO INC. Nella Figura 2 viene mostrato l’attuale versione del sistema.
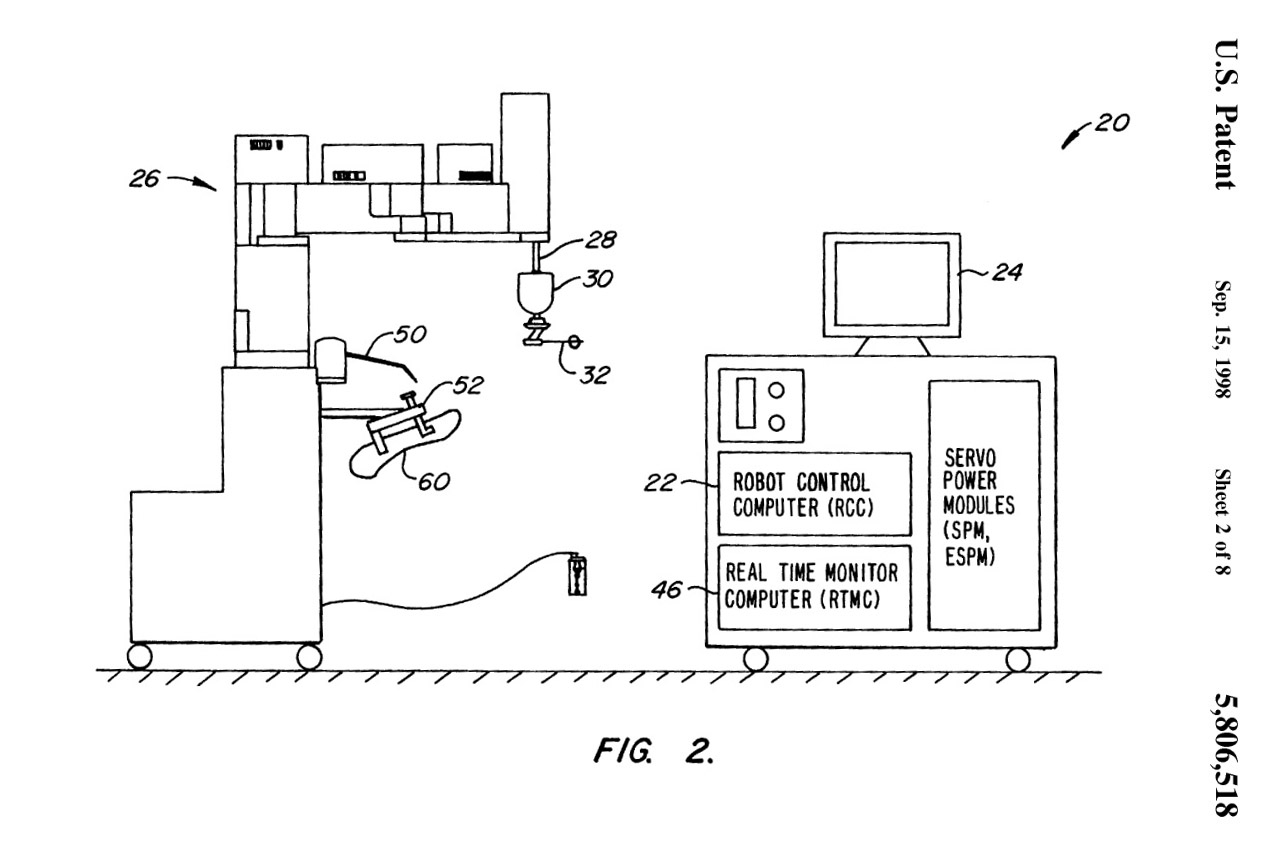
Nella Figura 3 viene proposta una rappresentazione schematica di tale sistema, estratta dal brevetto US5806518, presentato il 15 settembre del 1998 da Brent D Mittelstadt, in forze presso la Integrated Surgical Systems, azienda che sviluppò e distribuì per prima il sistema.
-

-
Figura 2.
Sistema ROBODOC [Fonte: curexo.com]
-
- Figura 3. Rappresentazione schematica del sistema ROBODOC [Fonte: uspto.gov]
-

- Figura 4. Sistema robotico semiattivo MAKOTM [Fonte: stryker.com]

Un altro sistema interessante è il braccio robotico semiattivo MAKOTM, utilizzato nell’artroplastica dell’anca e del ginocchio, mostrato in Figura 4.
Nella Figura 5 viene mostrato un estratto del brevetto US9539060, che evidenzia il sistema di tracciamento inerziale con la realizzazione dell’apposita catena cinematica. Quest’ultima, è stata sviluppata a partire dal 2011, come mostrato schematicamente nell’estratto del brevetto US8010180B2 (Figura 6).
-
- Figura 5. Sistema di tracciamento del braccio robotico semiattivo MAKOTM [Fonte: uspto.gov]
-
- Figura 6. Catena cinematica del sistema robotico semiattivo MAKOTM [Fonte: uspto.gov]
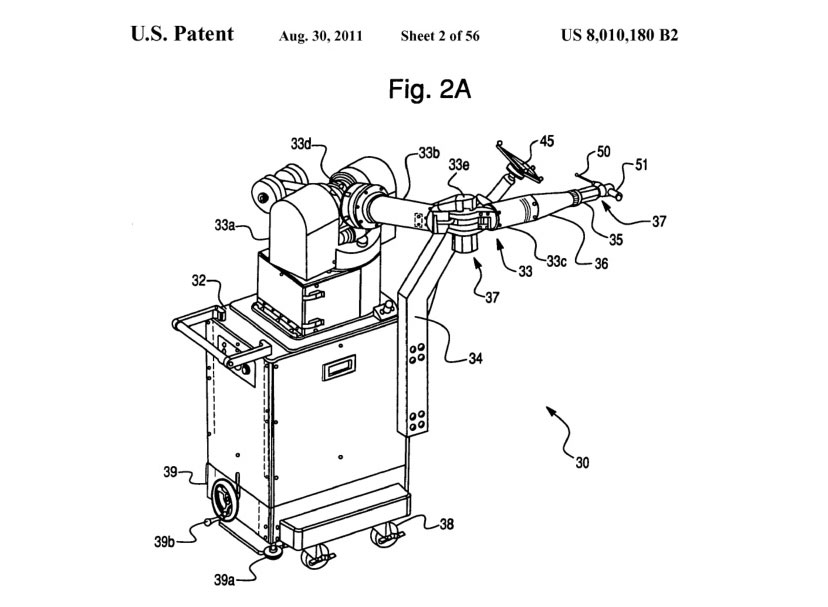

Figura 7. Rappresentazione schematica del sistema robotico per la chirurgia spinale di Mazor Robotics [Fonte: uspto.gov]
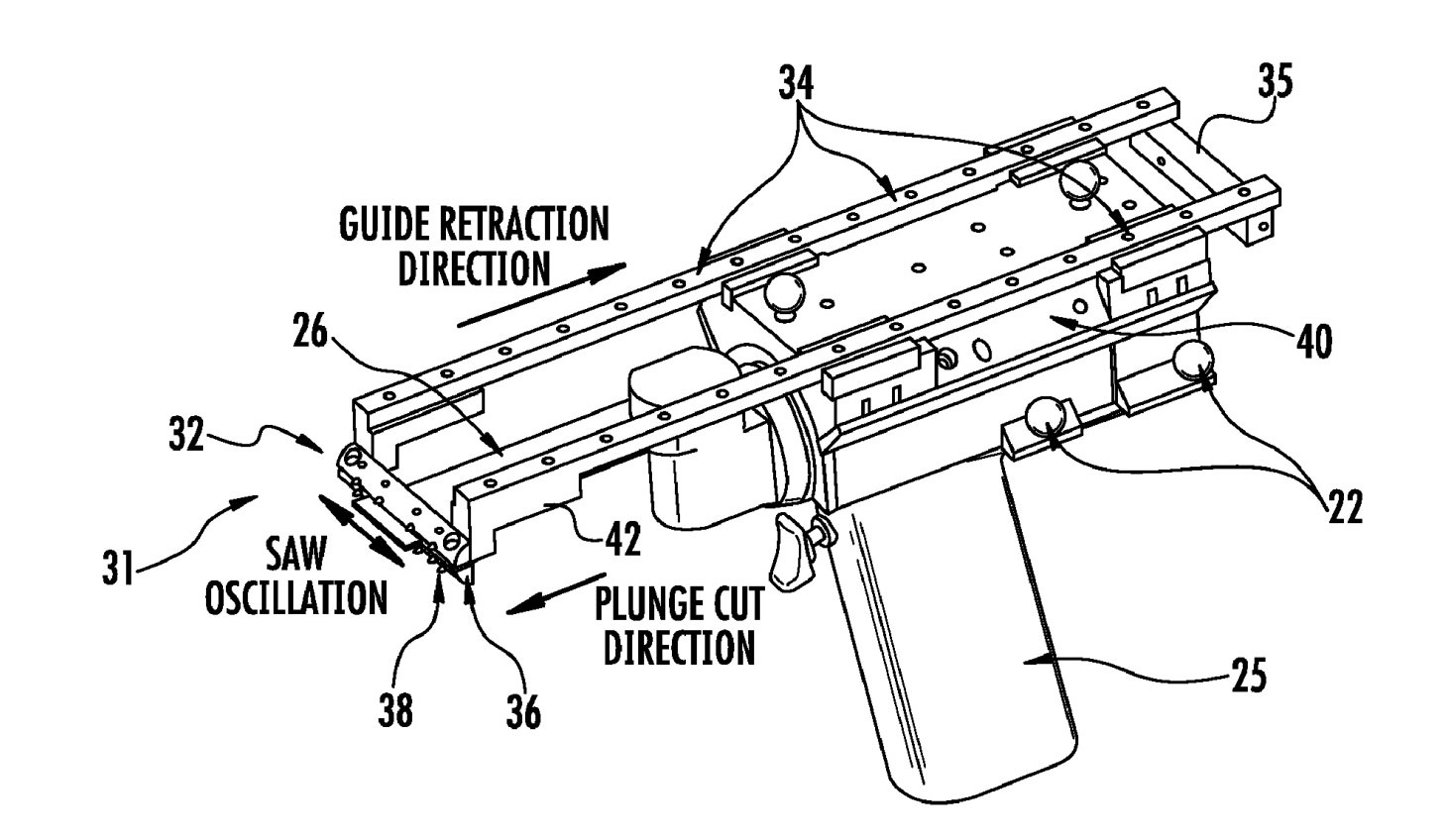
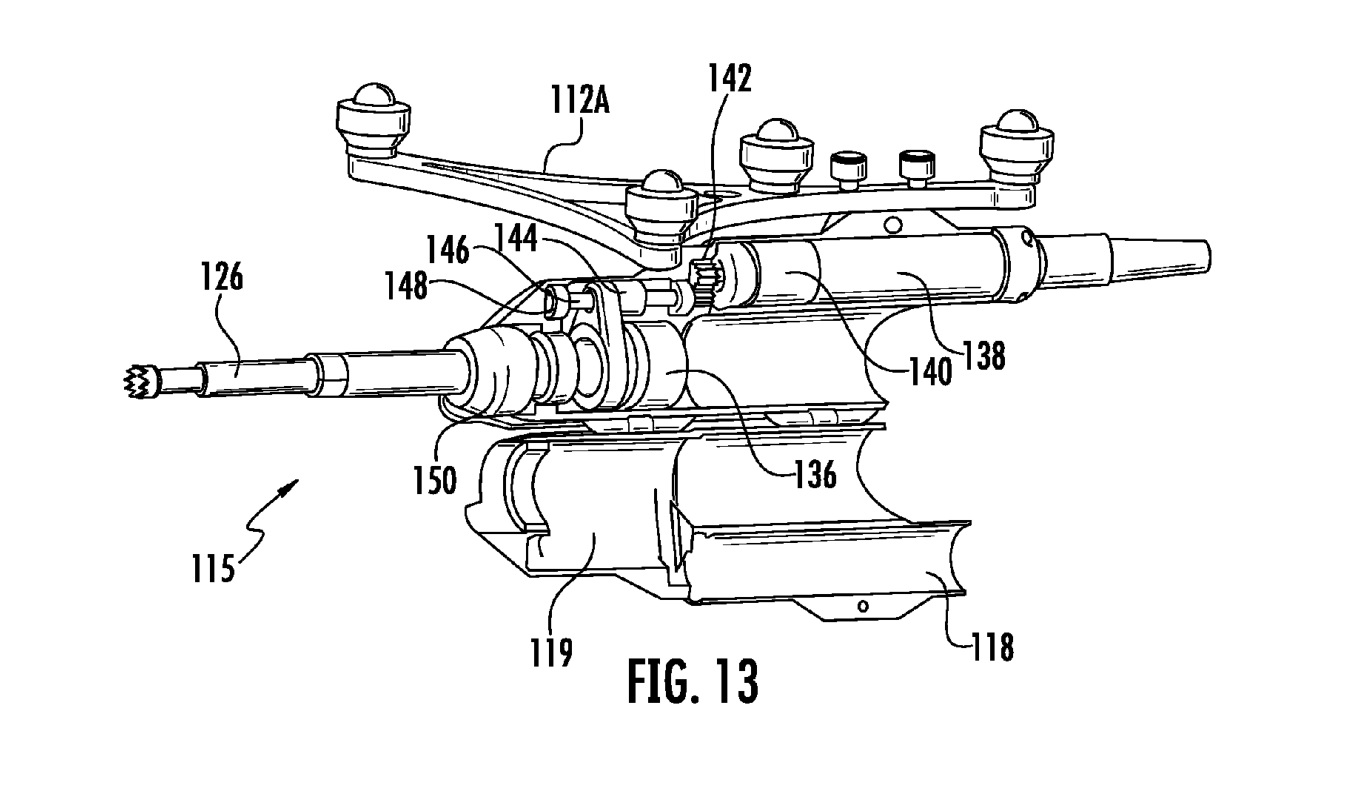
Un ultimo esempio riguarda i sistemi robotici portatili, con funzionalità di stabilizzazione e di controllo dello strumento chirurgico, avendo per riferimento i dati di tracciamento.
Nella Figura 8 e nella Figura 9 vengono mostrate schematicamente le soluzioni proposte nel 2011 dalla Blue Belt Technologies, estratte dal brevetto US 2012/0123418 A1.
-
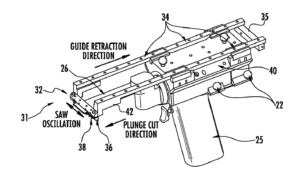
- Figura 8. Rappresentazione schematica di un sistema robotico portatile [Fonte: uspto.gov]
-
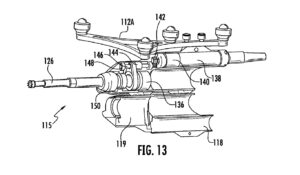
- Figura 9. Rappresentazione schematica di un sistema robotico portatile [Fonte: uspto.gov]
Il ruolo del fornitore di componenti
Un’attività complessa come la progettazione nell’ambito della robotica medicale, può trovare un valido supporto nei fornitori di componenti. È il caso di R+W, azienda leader nella produzione di giunti e alberi di trasmissione, in grado di mettere la sua esperienza a disposizione del progettista. Nel settore della robotica medicale, R+W fornisce una gamma completa di soluzioni per tutte le esigenze di trasmissione e limitazione della coppia, quali: giunti a soffietto metallico della serie BK, giunti ad elastomero della serie EK e limitatori di coppia della serie SK.
