








I carichi nei sistemi ad inseguimento solare

I sistemi ad inseguimento solare hanno la funzione di massimizzare la producibilità annua di un sistema fotovoltaico o solare termodinamico.
A tal fine, la movimentazione di tali sistemi deve essere concepita in modo da rispondere a due requisiti fondamentali:
- minimizzare l’angolo di incidenza con cui la radiazione solare impatta sul piano dei moduli fotovoltaici. Tale angolo è formato dalla direzione della radiazione solare con la normale alla superficie dei moduli.
- consentire la corretta focalizzazione nei sistemi a concentrazione.
I sistemi a concentrazione sono prevalentemente di tipo solare termodinamico. Essi sono basati sia sul principio fisico della riflessione (collettori parabolici lineari, collettori parabolici a disco, sistemi di riflessioni a lenti di Fresnel, impianti a torre centrale) che su quello della rifrazione (sistemi basati sulle lenti di Fresnel).
I sistemi a concentrazione si distinguono, poi, in base alla modalità di concentrazione della radiazione solare. Si hanno così sistemi imaging (in cui si ha la riproduzione dell’immagine del disco solare) e sistemi non imaging (sistemi a concentrazione solare massima).
Tipologie di inseguimento solare
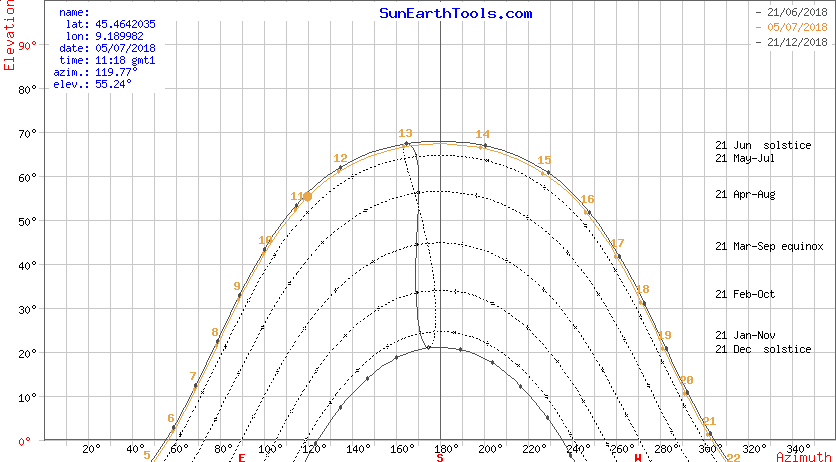
La funzione fondamentale della movimentazione di un sistema ad inseguimento solare è seguire il sole nel suo percorso apparente nel cielo. Tale percorso assume due valori caratteristici, in termini di altezza del sole, in due date precise dell’anno:
- il 21 giugno (solstizio di estate), assume l’altezza massima per un angolo di azimuth pari a 180° (direzione Sud);
- il 21 dicembre (solstizio di inverno), assume l’altezza minima per il medesimo valore dell’angolo di azimuth.
La fase iniziale dell’attività di progettazione di un sistema solare ad inseguimento, consiste nello stabilire la tipologia di attuazione dell’inseguitore, partendo dal diagramma solare (riferito al sito di istallazione) e dalla relativa stima di producibilità. La stima di producibilità va integrata da un tracciamento del profilo dell’orizzonte il più possibile vicino a quello reale, tenendo conto degli ombreggiamenti ricavabili tramite rilievo clinometrico. Di seguito viene proposto il diagramma cartesiano del percorso solare per un particolare sito:
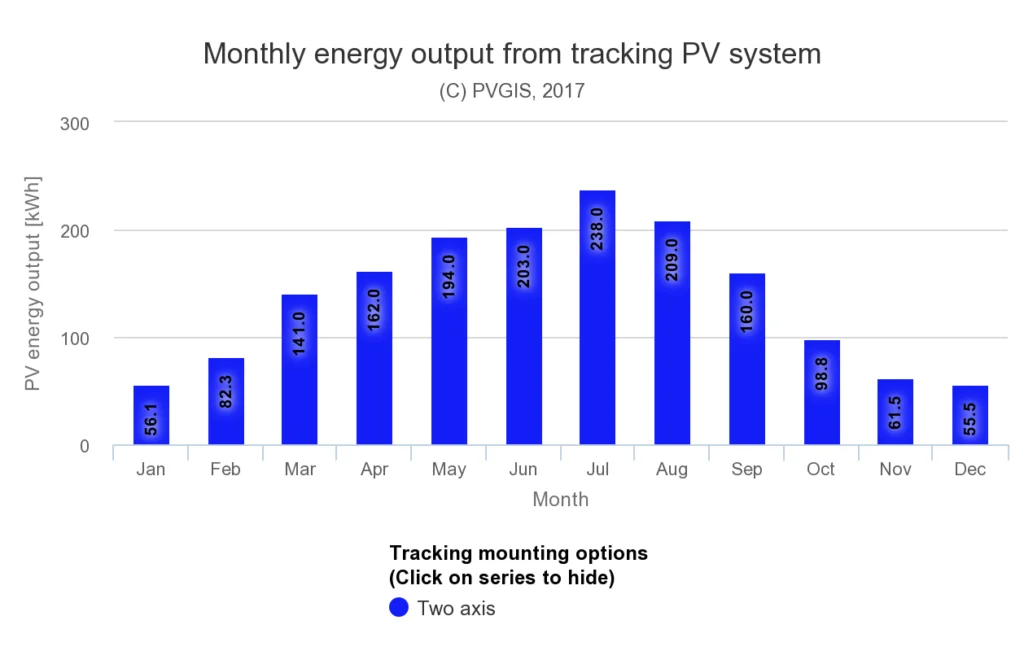
Per quanto riguarda le indicazioni di massima sulla producibilità, ottenibile nel medesimo sito, si può fare riferimento al diagramma seguente:
Nel diagramma successivo viene mostrato il profilo stimato dell’orizzonte, da confrontare eventualmente con i dati ricavati da un rilievo clinometrico:

Profilo stimato dell’orizzonte, nel centro di Milano (fonte)
Si osservi come, nei diagrammi precedenti, il valore di azimuth corrispondente alla direzione Sud è pari a 180° nel diagramma cartesiano del percorso solare, mentre è pari a 0° nel profilo stimato dell’orizzonte. Ciò costituisce una particolare convenzione, usata nella stima di producibilità degli impianti fotovoltaici.
Le informazioni ricavabili dai diagrammi precedenti, permettono di scegliere tra un inseguimento solare di tipo stagionale o uno di tipo giornaliero.
Nell’inseguimento di tipo stagionale, l’inseguitore viene collocato con la superficie ricevente orientata verso Sud. Il sistema seguirà il percorso del sole ricorrendo ad una movimentazione che fa variare l’angolo di inclinazione rispetto all’orizzontale (angolo di tilt).
Nell’inseguimento di tipo giornaliero, la movimentazione fa variare l’angolo di azimuth in maniera opportuna da Est ad Ovest, per appositi settaggi dell’angolo di tilt.
Inseguitori ad uno o due gradi di libertà
Sulla base delle precedenti osservazioni, si può procedere ad una classificazione dei sistemi ad inseguimento solare basata sui gradi di libertà. Si distinguono così:
- inseguitori ad un grado di libertà (o monoassiali)
- inseguitori a due gradi di libertà (o biassiali).
Inseguitori ad un grado di libertà
Gli inseguitori ad un grado di libertà vengono usati a quelle latitudini che consentono l’ottenimento di determinati valori della producibilità, variando opportunamente l’angolo di tilt (fissato l’angolo di azimuth nel caso di inseguimento stagionale) o variando l’angolo di azimuth (fissato quello di tilt nel caso di inseguimento giornaliero). Di seguito viene mostrato un inseguitore monoassiale, adatto all’impiego in uno dei due tipi di inseguimento prescelto:

Inseguitori a due gradi di libertà
Negli inseguitori a due gradi di libertà, la movimentazione viene ottenuta impiegando un gruppo motoriduttore per l’angolo di tilt ed un analogo per l’angolo di azimuth. Questo tipo di inseguitori costituisce la scelta tipica per i sistemi solari a concentrazione, sia fotovoltaici che termodinamici.
Nei sistemi solari a concentrazione, l’opportuna scelta degli accoppiamenti cinematici permette il mantenimento delle caratteristiche ottiche, necessarie a conseguire la captazione della componente diretta della radiazione solare, sulla base dei principi fisici prima esposti.
Di seguito viene mostrato un inseguitore solare a concentrazione fotovoltaico.


In un inseguitore solare a concentrazione termodinamico, la radiazione solare viene focalizzata su un sistema di cogenerazione realizzato con un motore Stirling. Di seguito viene mostrato un sistema di questo tipo.
Dall’osservazione dei due precedenti sistemi, risulta evidente come gli accoppiamenti cinematici giochino un ruolo fondamentale nella corretta attuazione del moto di inseguimento del percorso solare. E’ infatti necessaria la precisione nell’attuazione dei segnali inviati dal sistema di controllo automatico (tracker) al motoriduttore, per cui l’accoppiamento cinematico dovrà garantire la totale assenza di giochi, rispecchiando le letture angolari degli encoder elaborate dal sistema di controllo.
Carichi agenti su un sistema ad inseguimento solare
Gli inseguitori solari biassiali costituiscono, alla luce di quanto visto, il sistema ad inseguimento per cui è richiesto il maggior impegno di risorse progettuali.
Nella fase di dimensionamento di massima di tali sistemi, bisogna tenere conto delle seguenti tipologie di carico:
- peso proprio;
- carichi da vento;
- carichi da neve.
Tali carichi vengono considerati agenti sia in condizioni di riposo che in condizioni di esercizio.
Per condizione di riposo si intende, generalmente, la posizione raggiunta dal sistema a seguito dell’intervento del sistema di protezione (implementato nel sistema di controllo) in caso di superamento dei valori di velocità del vento prestabiliti o per il verificarsi di fenomeni atmosferici eccezionali (ad es. grandine). Il sistema di movimentazione posizionerà i moduli fotovoltaici, o il concentratore parabolico, in una posizione di sicurezza, detta anche posizione di riposo.
Per condizione di esercizio si intende quella in cui la movimentazione dell’inseguitore solare consente la captazione della radiazione solare diretta, nei termini prima esposti.
Tutte e tre le tipologie di carico costituiscono i dati di progetto fondamentali per il corretto dimensionamento e la scelta della tipologia dei gruppi motoriduttori, da realizzarsi sia per il movimento di tilt che per quello di azimuth. In particolare, l’accoppiamento cinematico verrà realizzato tra i suddetti motoriduttori (formati da un motore elettrico 230/400Vac o 12/24Vcc e da un riduttore epicicloidale) e le ralle di azimuth e di tilt. E’ necessario quindi che l’accoppiamento cinematico svolga delle opportune funzioni di limitazione della coppia, specie per la protezione dell’azionamento dai carichi accidentali che possono essere trasmessi dalla struttura e dalle ralle prima dell’intervento del sistema di protezione, per effetto degli eventi atmosferici su citati.

Vista esplosa di una ralla di azimuth (fonte)

Ralla di tilt con gruppo motoriduttore (fonte)
Le ralle di azimuth e quelle di tilt sono dei dispositivi consistenti in un accoppiamento corona – vite senza fine. Esse svolgono la duplice funzione di movimentazione finale (tramite la trasmissione di una coppia opportunamente ridotta) e di incremento della rigidezza strutturale. Infatti, la cassa ed i terminali flangiati delle ralle vengono realizzati in modo da consentire la realizzazione delle giunzioni bullonate strutturali più critiche. In alto viene mostrata la vista esplosa di una ralla di azimuth (o orizzontale), di seguito una ralla di tilt (o verticale):
Per procedere al dimensionamento finale dei suddetti cinematismi, si consideri lo schema strutturale di seguito rappresentato:

Le condizioni di carico che il progettista dovrà considerare sono quelle in cui alle componenti di carico statiche (da peso proprio e da neve) si sommeranno quelle dovute all’insieme degli effetti aerodinamici determinati dal vento. Le componenti di carico aerodinamico saranno funzioni della forma, dell’orientamento e delle dimensioni dell’inseguitore solare.
Un’ipotesi ulteriore sulle condizioni di carico è che gli spostamenti determinati sulla struttura dell’inseguitore dall’azione del vento siano sufficientemente piccoli, in modo che il sistema si possa considerare identificabile con la sua configurazione iniziale. La risposta della struttura di un inseguitore solare potrà quindi essere determinata con i metodi classici dell’analisi strutturale.
Considerando, comunque, la struttura dell’inseguitore solare come essenzialmente leggera, flessibile, poco smorzata e con forma aerodinamica comunque suscettibile delle azioni del vento, si ha che gli spostamenti e le velocità strutturali dovute a tali azioni possono essere così rilevanti da provocare fenomeni di interazione vento-struttura detti fenomeni aeroelastici. Tali fenomeni arrivano a modificare il vento incidente, le azioni aerodinamiche e la risposta globale della struttura.
Stabilito un valore per la velocità del vento, dovranno poi essere tenuti in conto (sulla base delle normative in vigore) gli effetti della turbolenza tipici dell’orografia del sito di istallazione. Ciò consentirà una corretta valutazione finale della velocità di riferimento e della relativa pressione cinetica.

Analisi CFD di un inseguitore solare biassiale (fonte)
Come step finale della stima dei carichi agenti sull’inseguitore, si dovranno determinare le azioni statiche equivalenti. Tali azioni partono dalla determinazione della pressione dinamica, ricavata dalla pressione cinetica tramite opportuni coefficienti correttivi di esposizione, di forma (o aerodinamici) e dinamici (legati all’insorgenza di fenomeni di vibrazione dovuta alla non uniformità delle pressioni). Si deduce da ciò la fondamentale importanza delle capacità di smorzamento degli accoppiamenti cinematici, anche in termini di sicurezza sull’incertezza della stima dei suddetti coefficienti. Sulla letteratura specializzata è poi possibile ricorrere a particolari abachi di correlazione, al fine di stimare le componenti di carico mostrate nello schema precedente. Tali abachi di correlazione sono comunque ricavati da prove in galleria del vento su modelli in scala dell’inseguitore.
Attualmente, tali prove vengono sostituite da efficienti modelli di simulazione ricavati tramite l’analisi CFD (o analisi di Fluidodinamica Computazionale). Tale tecniche di simulazione numerica consentono di ottenere, in tempi ridotti, non solo una valutazione degli effetti locali della turbolenza ma anche un valido supporto per il design-check durante l’attività di progettazione. Di seguito, viene mostrata una tipica analisi CFD di un inseguitore biassiale.
Il ruolo del fornitore di componenti
Un’attività complessa come la progettazione nell’ambito dei sistemi ad inseguimento solare, può trovare un valido supporto nei fornitori di componenti. È il caso di R+W, azienda leader nella produzione di giunti e alberi di trasmissione, in grado di mettere la sua esperienza a disposizione del progettista.
Nel settore dei sistemi ad inseguimento solare, R+W fornisce una gamma completa di soluzioni per tutte le esigenze di trasmissione e limitazione della coppia, quali: giunti a soffietto metallico della serie BK, giunti ad elastomero della serie EK e limitatori di coppia della serie SK.
